|
|
гаШЮКЮЮЪЬтПЩЕчЛАзЩбЏЃК15011062927
ФњашвЊ ЕЧТМ ВХПЩвдЯТдиЛђВщПДЃЌУЛгаеЫКХЃПСЂМДзЂВс
x
ШЫЙЄжЧФмЯЕСаЯюФПеЙЪОСЫДДзїепЪЙгУUnityжЦзїЕФвЛЯЕСаШЫЙЄжЧФмЯюФПЃЌЯюФПЩцМАШЫЙЄжЧФмВњЦЗЁЃБОАИР§жаеЙЪОСЫзюНќЪЙгУUnityЮЊOpenCVПеМфШЫЙЄжЧФмОКШќжЦзїЕФвЛИіЯюФПЕФвЛаЉЪЕгУзЪСЯЃЌИУЯюФПвдвЛЯЕСаСюШЫгЁЯѓЩюПЬЕФР§згеЙЪОСЫUnityжаЕФЛњЦїШЫММЪѕЁЂМЦЫуЛњЪгОѕЁЂЧПЛЏбЇЯАКЭдіЧПЯжЪЕЕШЙІФмЁЃ
UnityЪЧЪРНчвЛСїЕФЪЕЪБ3Dв§ЧцЁЃЫфШЛUnityЕФгЮЯЗв§ЧцКЭЙЄОпДЋЭГЩЯжЛжЇГжгЮЯЗПЊЗЂепЃЌЕЋAI@UnityЭХЖге§дкЮЇШЦЛњЦїбЇЯАЁЂМЦЫуЛњЪгОѕКЭЛњЦїШЫФЃФтЕШСьгђЙЙНЈШЋаТЕФЙЄОпЃЌвджЇГжгЮЯЗвдЭтЕФгІгУЃЌгШЦфЪЧФЧаЉЪЙгУШЫЙЄжЧФмКЭЪЕЪБ3DЛЗОГЕФгІгУЁЃ
дкOpenCVПеМфШЫЙЄжЧФмОКШќжаGerard EsponaКЭKaudaTeamЬсЙЉСЫЖрИіАИР§зїЦЗЃЌЫћУЧДѓСПЪЙгУСЫUnityЕФШЫЙЄжЧФмЙЄОпКЭШэМўАќЁЃЭХЖгЭЈЙ§ЪЙгУUnityЕФИажЊАќбЕСЗМЦЫуЛњЪгОѕФЃаЭВЂЭЈЙ§вЦЖЏДњРэЙЄОпАќРДбЕСЗЫћУЧЕФЛњЦїбЇЯАФЃаЭЃЌДЫЭтЫћУЧЛЙзіГівЛИіЛњЦїШЫЪжБлЕФФЃФтбнЪОАИР§ЁЃ
OpenCVМЦЛЎ
Kauda TeamУћзжЕФгЩРД
Kauda TeamгЩGiovanni LerdaКЭGerard EsponaСНУћГЩдБзщГЩЃЌУћзжРДздGiovanniДДНЈЕФУтЗбПЊдДзРУцДѓаЁЕФ3DДђгЁ5жсЛњаЕБлЁЊЁЊKaudaЁЃетЪЧвЛИіЗЧГЃАєЕФзРУцЛњЦїБлЃЌШЮКЮШЫЖМПЩвдЪЙгУЃЌЧвдЪаэЫћУЧдкЯюФПЩЯдЖГЬКЯзїЁЃ
KaudaЛњаЕБл
ШчКЮдкUnityЛёЕУKaudaЛњаЕБлЕФЪ§зжТЯЩњ
Giovanni LerdaКЭGerard EsponПЊЗЂСЫKaudaЙЄзїЪвЃЌетЪЧвЛИіUnityЕФгІгУГЬађЃЌФПЕФЪЧЮЊСЫЩњГЩKaudaЕФЪ§зжТЯЩњЁЃЫќЭЈЙ§ЗДЯђдЫЖЏбЇЃЈIKЃЉПижЦЁЂUSB/РЖбРСЌНгЕНецЪЕЕФKaudaЃЌЬсЙЉСЫЙІФмЦыШЋЧвОЋШЗЕФKaudaЛњаЕБлФЃФтЃЌВЂПЩвджЇГжЖрИіOpenCV OAK-DЯрЛњЁЃ
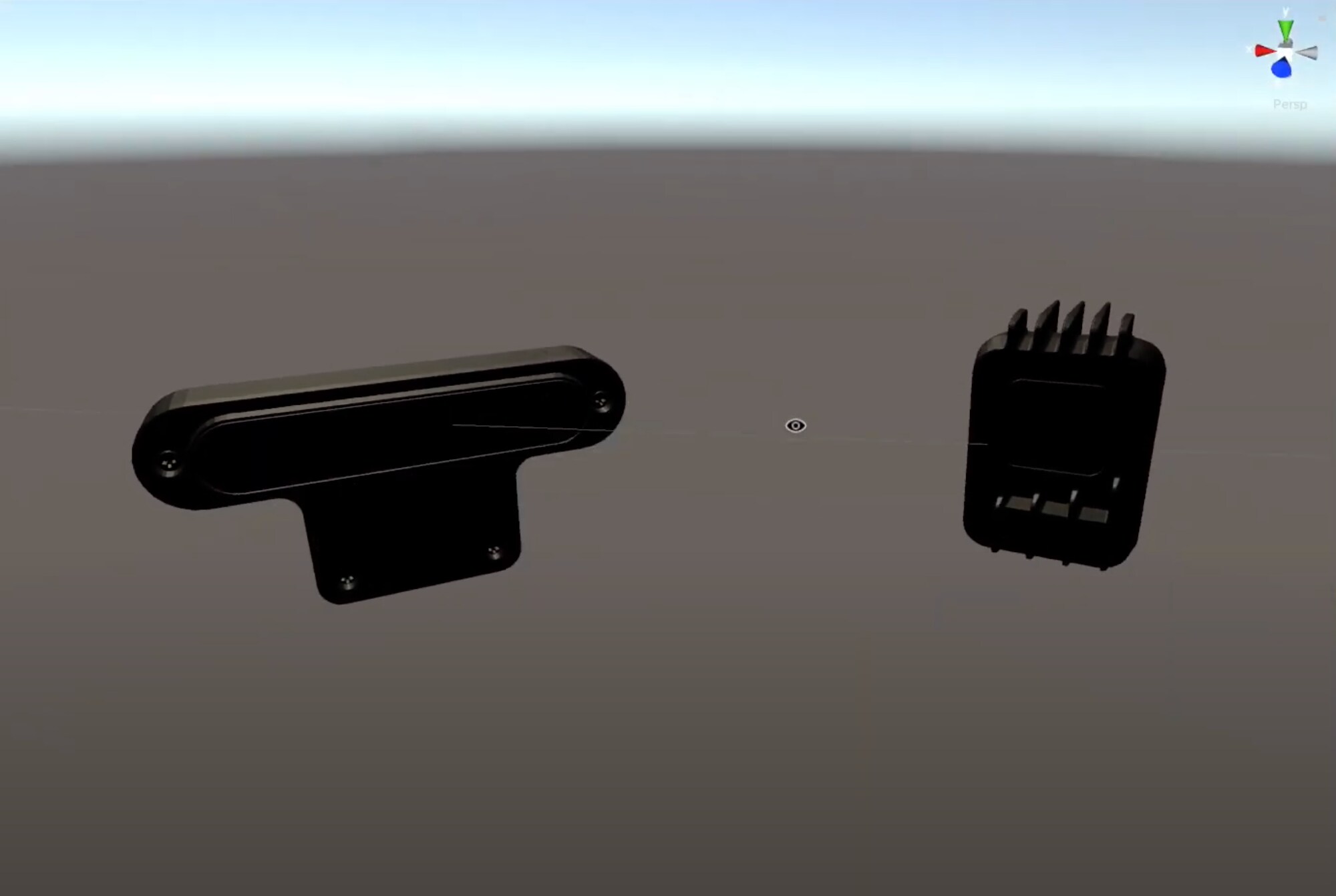
OAK-DЯрЛњЪЧЪВУДЃЌЫќЪЧШчКЮгыUnityвЛЦ№ЪЙгУЕФЃП
OAK-DЯрЛњНсКЯСЫСНИіСЂЬхЩюЖШЯрЛњКЭвЛИіДјгаАхдиДІРэЙІФмЕФ4KВЪЩЋЯрЛњЃЈгЩгЂЬиЖћMyriadX VPUЬсЙЉЃЉЃЌПЩздЖЏДІРэИїжжЧщПіЁЃзїЮЊОКШќзїЦЗЃЌKauda TeamЮЊOAKЩшБИЙЙНЈСЫвЛИіUnityВхМўЃЌЕЋЫћУЧвВЯыдкUnityжаДДдьГівЛИіЪ§зжТЯЩњЩшБИЁЃOAK-D UnityЪ§зжТЯЩњЯрЛњЮЊЫћУЧЬсЙЉСЫАяжњЃЌетЪЧвЛВПОпгаОЋШЗФЃФтЙІФмЕФ3DащФтЯрЛњЃЌПЩгУгкКЯГЩЪ§ОнЪеМЏЁЃOAK-D UnityЪ§зжТЯЩњЯрЛњАяжњЫћУЧНЋащФтЭМЯёЪфШыЕНецЪЕЩшБИЕФЙмЕРжаЁЃШУЫћУЧЭЈЙ§ЪЙгУUnityИажЊАќРДЪеМЏКЯГЩЫиВФЃЌВЂгУгкЮЊащФтOAK-DЯрЛњбЕСЗЖЈжЦЯюФПЁЃ
OAK-DЯрЛњжаЕФUnityФЃаЭ
дкUnityжагЕгавЛИіЪ§зжТЯЩњФЃаЭЕФгХЪЦ
гЕгавЛИіЪ§зжТЯЩњШУGerard EsponФмЙЛдкKaudaЩЯЦєгУЖюЭтЕФЙІФмЁЃЫћУЧЛЙФмЙЛЪЙгУUnityЕФдіЧПЯжЪЕЃЈARЃЉЙІФмгыЯжЪЕЪРНчжаЕФащФтЛњЦїШЫНјааНЛЛЅЁЃЦфжаЕФвЛИігІгУЪЧбЇЯАШчКЮдкВЛашвЊЛњЦїШЫЕФЧщПіЯТЖдЛњЦїШЫНјааЮЌЛЄЁЃетвВдЪаэЫћУЧгУЮоДњТыЗНЗЈБрГЬЫГађШЮЮёЃЌЪЙЛњЦїБлОЋШЗЕФЭъГЩШЮЮёЁЃ
Ъ§зжТЯЩњЛЙФмЪЙЫћУЧЖдЛњаЕБлНјааЧПЛЏбЇЯАЃЈRLЃЉбЕСЗЁЃRLЪЧвЛИіКФЪБЕФЙ§ГЬЃЌГ§СЫМЋЦфМђЕЅЕФАИР§жЎЭтЃЌШЮКЮЪТЧщЖМашвЊФЃФтЁЃЮЊДЫKauda TeamдкUnityжаЪЙгУСЫML-agentЙЄОпАќРДжДааRLбЕСЗвдЖдЛњаЕБлНјаабЕСЗгыПижЦЁЃ
Kauda TeamЛЙдкUnityжаВтЪдСЫШЫЛњазїКЭАВШЋГЬађЃЌЫћУЧдкUnityжаДДНЈСЫЪ§зжТЯЩњЛњаЕБлЃЌВЂЪЙгУЩуЯёЭЗВтСПШЫРрдкЛњаЕБлЧјгђФкЕФЮЛжУЁЃПЩвдЯыЯѓетбљзіЪЧЮЊСЫФЧаЉИќДѓаЭЕФЛњЦїШЫЃЌЕБГЬађДэЮѓЗЂЩњЪБЃЌЫќЛсЖдШЫРрдьГЩЩЫКІЁЃФЃФтЛЗОГШУЫћУЧПЩвддкВЛЮЃМАШЫРрАВШЋЕФЧщПіЯТВтЪдетаЉГЁОАЁЃ
ML-agentЙЄОпАќЕФгУЗЈ
ЁАЧПЛЏбЇЯАЃЈRLЃЉбЕСЗЪЧвЛИіЧПДѓЕФЛњЦїШЫПђМмЃЌЖјUnity ML-agentвВЪЧвЛИіКмАєЕФЙЄОпАќЃЌЫќЪЙЮвУЧЕФЪ§зжТЯЩњЛњаЕБлФмЙЛбЇЯАКЭжДааИДдгЕФШЮЮёЁЃгЩгкОКШќЕФЪБМфгаЯоЃЌФПБъЪЧЪЕЯжвЛИіМђЕЅЕФRLЁАНгДЅЁБШЮЮёЃЌВЂНЋЩњГЩЕФФЃаЭзЊЛЛЮЊдкOAK-DЩшБИЩЯдЫааЭЦРэЁЃЭЈЙ§ЪЙгУML-agentЙЄОпАќЃЌЛњЦїШЫЪЙгУIKПижЦбЇЯАЕФзюМбТЗОЖЃЌвдЖЏЬЌНгДЅМьВтНгДЅЕНЕФ3DЖдЯѓЁЃЁБGerard EsponЫЕЕРЁЃ
ЮЊСЫЪЕЯжетвЛЕуЃЌKauda TeamЪзЯШЪЙгУСЫspatial tiny YOLOЃЌетАяжњЫћУЧЪЕЯжСЫШ§ЮЌЮяЬхМьВтЁЃRLФЃаЭЃЈPPOЃЉЪЙгУНсЙћМьВтКЭIKПижЦЕуЕФЮЛжУзїЮЊЪфШыЙлВьЁЃЙигкЪфГіЖЏзїЃЌIKПижЦЕуЕФФмЙЛЪЕЯж3жсвЦЖЏЁЃНБРјЯЕЭГЛљгкУПвЛВНЕФаЁГЭЗЃКЭЛњЦїШЫНгДЅЮяЬхЪБЕФДѓНБРјЃЈ1.0ЃЉЖјжЦЖЈЁЃЮЊСЫМгПьбЕСЗЫйЖШЃЌKauda TeamРћгУЖрДњРэЭЌЪБбЇЯАРДПЊЗЂащФтspatial tiny YOLOЃЌЦфЪфГіЖЏзїгыецЪЕspatial tiny YOLOЯрЭЌЁЃ
ЕБФЃаЭбЕСЗЭъГЩКѓЃЌЫћУЧЪЙгУOpenVinoЙЄОпАќНЋЦфзЊЛЛЮЊOpenVino IRКЭMyriad BlobИёЪНЃЌНЋФЃаЭМгдиЕНOAK-DЩшБИЩЯВЂдЫааЭЦРэЁЃзюКѓЙмЕРжаЪЧвЛИіspatial tiny YOLOМгRLФЃаЭЁЃетРяЫћУЧЪЙгУСЫUnityВхМўЃЌвђЮЊUnityВхМўФмЙЛАяжњЫћУЧдкUnityжаЭЌЪБЪЙгУML-AgentsКЭOAK-DДњРэРДБШНЯЭЦРэЁЃ
КЯГЩЪ§Он
ЙмЕРЕФЕквЛНзЖЮЪЧ3DЖдЯѓМьВтЦїЃЌетЪЧвЛИіЛљгкШЫЙЄжЧФмЕФМЦЫуЛњЪгОѕКЭЛњЦїШЫШЮЮёЕФвЛИіЗЧГЃГЃМћЕФЦ№ЕуЁЃдкАИР§жаЃЌKauda TeamЪЙгУСЫвЛИідЄЯШбЕСЗКУЕФаЁаЭYOLO v3ФЃаЭUnityИажЊАќЃЌетШУЫћУЧФмЙЛЮЊЛњЦїШЫЕФбЕСЗЖЈжЦРрБ№ЁЃетШУKauda TeamФмЙЛдкМИЗжжгФкЩњГЩвЛИіДјгаздЖЏЕиУцецЪЕБпНчПђБъМЧЕФДѓаЭ3DФЃаЭКЯГЩЪ§ОнМЏЁЃЭЈГЃЃЌЪеМЏКЭБъМЧЙ§ГЬЪЧЗЧГЃКФЪБЕФЁЃгЕгаЩњГЩЗсИЛЪ§ОнМЏЕФФмСІЪЧвЛДѓНјВНЃЌИУЪ§ОнМЏОпгаДѓСПЫцЛњЛЏбЁЯюЃЌгЕгаВЛЭЌЕФНЧЖШЁЂДђЙтЧщПіЁЂЮЦРэБфЛЏЕШЁЃ
ПЊЗЂжаЕФРЇФб
ЁАЭЌВНащФтЯюФПКЭЯжЪЕЪРНчЯюФПЫљашЕФЪБМфгаЪБЛсгааЉЦЋРыЁЃЮвУЧШЯЮЊетПЩвдЭЈЙ§дкЮДРДЪЙгУROSРДНтОіЃЌШУЮвУЧКмИпаЫЕФЪЧUnityЯждке§ЪНжЇГжROSСЫЃЁЁБGerard EsponЫЕЕРЁЃ
|
|


 ЗЂБэгк 2021-10-21 16:52:38
ЗЂБэгк 2021-10-21 16:52:38

 ЗЂБэгк 2022-3-24 23:37:40
ЗЂБэгк 2022-3-24 23:37:40